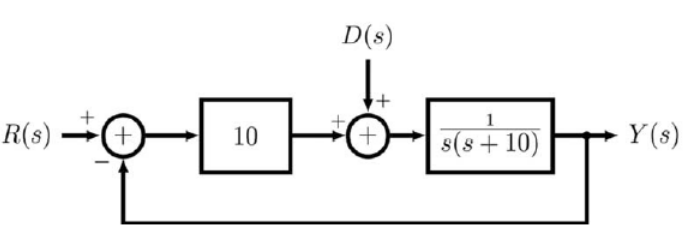
The block diagram of a closed-loop control system is shown in the figure. $R(s), Y(s),$ and $D(s)$ are the Laplace transforms of the time-domain signals $r(t), y(t),$ and $d(t),$ respectively. Let the error signal be defined as $e(t) = r(t) – y(t).$ Assuming the reference input $r(t) = 0$ for all $t,$ the steady-state error $e (\infty),$ due to a unit step disturbance $d(t),$ is __________ (rounded off to two decimal places).