The signal flow graph of a system is shown below.
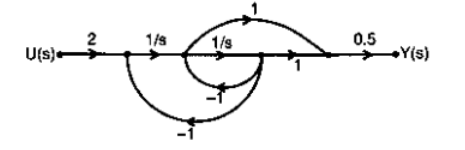
The state variable representation of the system can be
- $\begin{aligned} \dot{x} &=\left[\begin{array}{ll} 1 & 1 \\ -1 & 0\end{array}\right] x+\left[\begin{array}{l}0 \\ 2\end{array}\right] u \\ y &=\left[\begin{array}{ll}0 & 0.5\end{array}\right] x \end{aligned}$
- $\begin{aligned} \dot{x} &=\left[\begin{array}{ll}-1 & 1 \\ -1 & 0\end{array}\right] x+\left[\begin{array}{l}0 \\ 2\end{array}\right] u \\ y &=\left[\begin{array}{ll}0 & 0.5\end{array}\right] x \end{aligned}$
- $\begin{aligned} \dot{x} &=\left[\begin{array}{ll}1 & 1 \\ -1 & 0\end{array}\right] x+\left[\begin{array}{l}0 \\ 2\end{array}\right] u \\ y &=\left[\begin{array}{ll}0.5 & 0.5\end{array}\right] x \end{aligned}$
- $\begin{aligned} \dot{x} &=\left[\begin{array}{ll}-1 & 1 \\ -1 & 0\end{array}\right] x+\left[\begin{array}{l}0 \\ 2\end{array}\right] u \\ y &=\left[\begin{array}{ll}0.5 & 0.5\end{array}\right] x \end{aligned}$