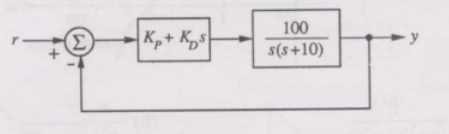
A control system with a $\text{PD}$ controller is shown in the figure. If the velocity error constant $K_{v}=1000$ and the damping ratio $\zeta=0.5$, then the values of $K_{P}$ and $K_{D}$ are
- $K_{P}=100, K_{D}=0.09$
- $K_{P}=100, K_{D}=0.9$
- $K_{P}=10, K_{D}=0.09$
- $K_{P}=10, K_{D}=0.9$