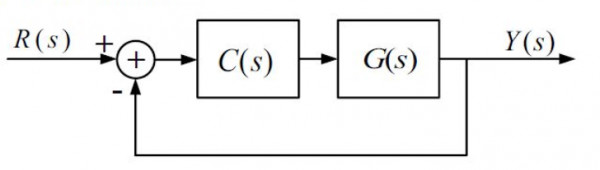
A satellite attitude control system, as shown below, has a plant with transfer function $G(s)=\frac{1}{s^{2}}$ cascaded with a compensator $C(s)=\frac{K(s+\alpha)}{s+4}$, where $K$ and $\alpha$ are positive real constants.
In order for the closed-loop system to have poles at $-1 \pm j \sqrt{3}$, the value of $\alpha$ must be $\_\_\_\_\_\_$.
- $0$
- $1$
- $2$
- $3$