The complete Nyquist plot of the open-loop transfer function $G(s)H(s)$ of a feedback control system in the figure.
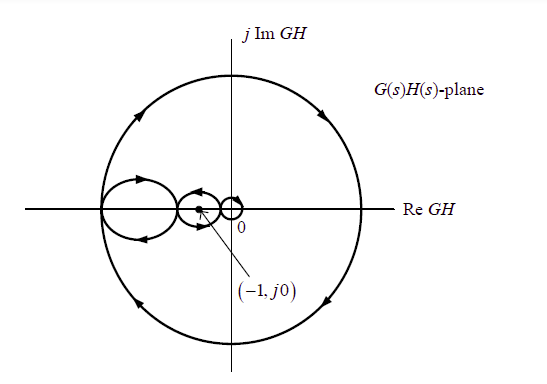
If $G(s)H(s)$ has one zero in the right-half of the $s$-plane, the number of poles that the closed-loop system will have in the right-half of the $s$-plane is
- $0$
- $1$
- $4$
- $3$