The block diagram of a feedback control system is shown in the figure
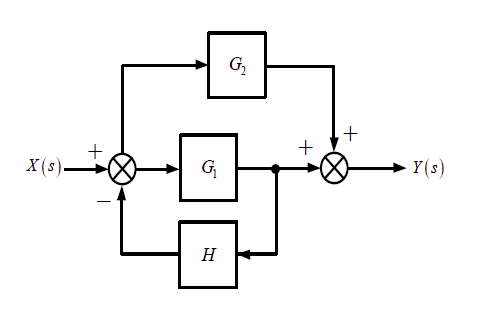
The transfer function $\dfrac{Y{\left ( s \right )}}{X {\left ( s \right )}}$ of the system is
- $\frac{G_{1}+G_{2}+G_{1}G_{2}H}{1+G_{1}H}$
- $\frac{G_{1}+G_{2}}{1+G_{1}H+G_{2}H}$
- $\frac{G_{1}+G_{2}}{1+G_{1}H}$
- $\frac{G_{1}+G_{2}+G_{1}G_{2}H}{1+G_{1}H+G_{2}H}$