The figure shows the Nyquist plot of the open-loop transfer function $\mathrm{G}(\mathrm{s}) \mathrm{H}(s)$ of a system. If $\mathrm{G}(s) \mathrm{H}(\mathrm{s})$ has one right-hand pole, the closed-loop system is
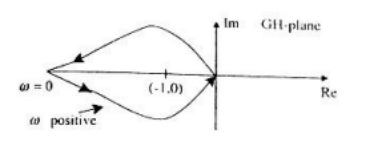
- always stable
- unstable with one closed-loop right hand pole
- unstable with two closed-loop right hand poles
- unstable with three closed-loop right hand poles