In the feedback control system shown in the figure below $G(s)=\frac{6}{s(s+1)(s+2)}$.
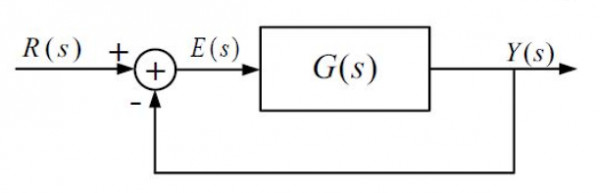
$\text{R(s), Y(s)}$, and $\text{E(s)}$ are the Laplace transforms of $r(t), y(t)$, and $e(t)$, respectively. If the input $r(t)$ is a unit step function, then
- $\lim _{t \rightarrow \infty} e(t)=0$
- $\lim _{t \rightarrow \infty} e(t)=\frac{1}{3}$
- $\lim _{t \rightarrow \infty} e(t)=\frac{1}{4}$
- $\lim _{t \rightarrow \infty} e(t)$ does not exist, $e(t)$ is oscillatory